Dr. Ehsan Amini
Introduction
Mandatory Lane Changes (MLC) occur when a vehicle must change lanes to reach a specific target (goal) lane to execute its next turn movement. This behavior is governed by a dynamic assessment of “urgency,” which scales driver aggressiveness and risk acceptance as the vehicle approaches the point where the maneuver must be completed. By calibrating lane-changing parameters, users can fine-tune when and how drivers become desperate to change lanes. Users can adjust these parameters in the Network → NETSIM → Calibration → Lane Changes (Driver Behavior) and Lane Changes tabs (Figure 1).
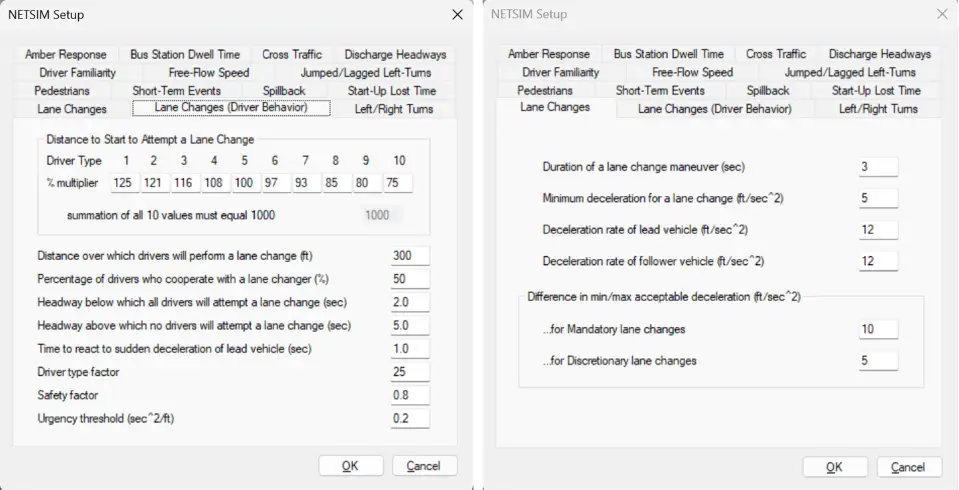
Figure 1: Urgency Threshold in NETSIM calibration parameters
Understanding the Urgency Factor (U)
The Urgency Factor (U) is an internal calculation that considers a driver’s natural aggressiveness, the number of lane changes remaining to reach the goal lane, the vehicle’s speed, and the distance to the object (such as a lane drop or turn pocket). As the distance to the maneuver point decreases, the Urgency Factor increases. This “urgency” [U] is computed as follows:
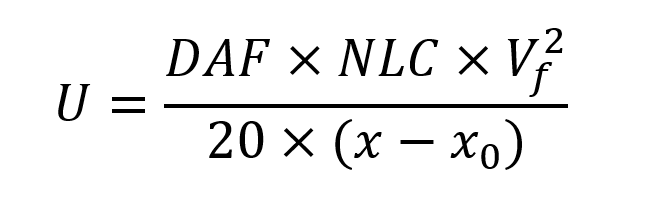

- NLC: The number of lane changes required to reach the “goal” lane, for a mandatory lane change (for a discretionary lane change, only one lane change will be made so NLC = 1)
- Vf: User-specified free-flow speed for this link
- X: Current position of the vehicle
- X0: Position of the object that causes the lane change
Setting the Point of Escalation: Urgency Threshold
The Urgency Threshold (U_t) defines the point at which a driver’s risk acceptance begins to increase. As long as the Urgency Factor is below this threshold, the driver only accepts a base level of risk (the minimum deceleration). Once U exceeds U_t, the driver’s acceptable deceleration (risk) begins to escalate linearly (Figure 2).
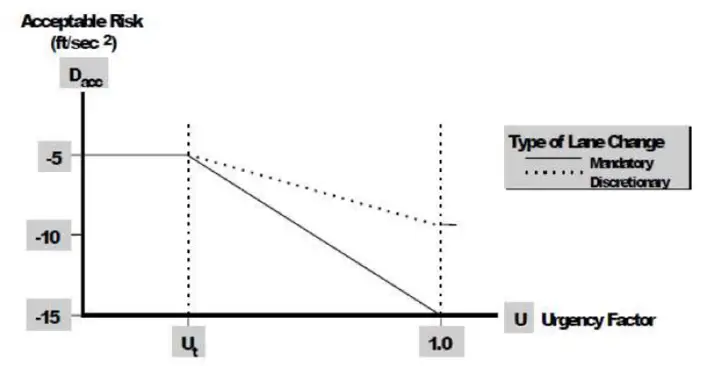
Figure 2: Urgency Threshold VS Acceptable Deceleration (Risk)
Controlling Risk Acceptance: Mandatory Deceleration
The minimum deceleration for lane changing (Dmin) sets the base level of risk a driver is willing to accept. A separate parameter defines how much higher the maximum acceptable deceleration can be for a mandatory lane change (Dmax). As urgency increases, this additional deceleration is added to the minimum value, eventually reaching the maximum acceptable risk.
Adjusting the Contemplation Distance
CORSIM looks up to 12 links ahead to determine a vehicle’s goal lanes. The mean longitudinal distance over which drivers decide to perform one lane change defines how far in advance they begin planning each maneuver.
For locations with directional access—such as entrance-only or exit-only configurations—only the relevant directional volume should be specified.
The Role of Driver Cooperation
A mandatory lane change is only successful if the driver is willing to take a risk and, in many cases, if the follower in the target lane is willing to cooperate.
Note: These parameters are specific to the NETSIM (urban street) model. While FRESIM (freeway) uses similar concepts of risk and cooperation, they are configured via different Record Type. For more information, please refer to CORSIM Reference Manual.